- How to Adjust X and Y Axis Scale in Arduino Serial Plotter (No Extra Software Needed)Posted 7 months ago
- Elettronici Entusiasti: Inspiring Makers at Maker Faire Rome 2024Posted 7 months ago
- makeITcircular 2024 content launched – Part of Maker Faire Rome 2024Posted 9 months ago
- Application For Maker Faire Rome 2024: Deadline June 20thPosted 11 months ago
- Building a 3D Digital Clock with ArduinoPosted 1 year ago
- Creating a controller for Minecraft with realistic body movements using ArduinoPosted 1 year ago
- Snowflake with ArduinoPosted 1 year ago
- Holographic Christmas TreePosted 1 year ago
- Segstick: Build Your Own Self-Balancing Vehicle in Just 2 Days with ArduinoPosted 1 year ago
- ZSWatch: An Open-Source Smartwatch Project Based on the Zephyr Operating SystemPosted 1 year ago
Q-Bot: Arduino-Powered Rubik’s Cube Solver
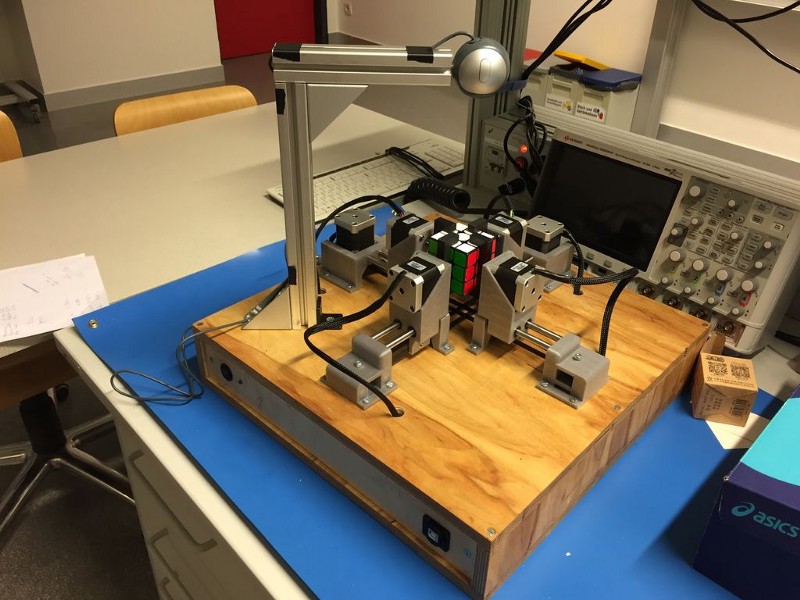
If you have a Rubik’s Cube lying around your house unsolved, maybe this open source machine might be just the thing.
The Q-Bot features six NEMA 17 stepper motors, four of which turn one face at a time. When needed, the other two use timing belts to alternatively pull opposed stepper motor pairs back, allowing the other two to rotate the entire assembly. An Arduino Mega is utilized to control the steppers via a custom shield, with a computer running the Kociemba’s Algorithm.
All you need to do it yourself is:
- 8 pieces of 8 mm aluminium rod (10cm length)
- 8 linear ball bearings (LM8UU)
- a little under 2 m of GT2 6mm timing belt + some pulleys
- 6 NEMA 17 bipolar stepper motors
- 6 Polulu 4988 stepper drivers
- an Arudino Mega as the controller for the project
- a 12 V 3A power supply
- a step down converter to safely power the arduino
- some screws and connectors
- some plywood for the base
Code and schematics are available on the Jocobs’ write-up. Watch the demonstrative video below for further information.

Related Posts



{kind=link}
-
 Arduino ISP (In System Programming) and stand-alone circuits
Arduino ISP (In System Programming) and stand-alone circuitsWe use an Arduino to program other ATmega without...
- Posted 13 years ago
-

-

-
 GSM GPS shield for Arduino
GSM GPS shield for ArduinoShield for Arduino designed and based on the module...
- Posted 13 years ago
-
 Small Breakout for SIM900 GSM Module
Small Breakout for SIM900 GSM ModuleSome post ago we presented a PCB to mount...
- Posted 14 years ago
-
 How to Control NeoPixel Installations via Wi-Fi Using Fishino and NodeMCU with Python
How to Control NeoPixel Installations via Wi-Fi Using Fishino and NodeMCU with PythonWe create NeoPixel light installations with Fishino and NodeMCU...
- Posted 6 months ago
-
 How to Adjust X and Y Axis Scale in Arduino Serial Plotter (No Extra Software Needed)
How to Adjust X and Y Axis Scale in Arduino Serial Plotter (No Extra Software Needed)The Serial Plotter in Arduino is an excellent tool...
- Posted 7 months ago
-
 Elettronici Entusiasti: Inspiring Makers at Maker Faire Rome 2024
Elettronici Entusiasti: Inspiring Makers at Maker Faire Rome 2024Maker Faire Rome 2024 is ready to amaze the...
- Posted 7 months ago
-
 makeITcircular 2024 content launched – Part of Maker Faire Rome 2024
makeITcircular 2024 content launched – Part of Maker Faire Rome 2024Applications to MakeITcircular must be in by October 3,...
- Posted 9 months ago
-
 SONY color camera module, 700 TV Lines
SONY color camera module, 700 TV LinesColor camera module equipped with a 1/3″ CCD sensor...
- Posted 10 months ago