- How to Adjust X and Y Axis Scale in Arduino Serial Plotter (No Extra Software Needed)Posted 4 months ago
- Elettronici Entusiasti: Inspiring Makers at Maker Faire Rome 2024Posted 4 months ago
- makeITcircular 2024 content launched – Part of Maker Faire Rome 2024Posted 6 months ago
- Application For Maker Faire Rome 2024: Deadline June 20thPosted 7 months ago
- Building a 3D Digital Clock with ArduinoPosted 1 year ago
- Creating a controller for Minecraft with realistic body movements using ArduinoPosted 1 year ago
- Snowflake with ArduinoPosted 1 year ago
- Holographic Christmas TreePosted 1 year ago
- Segstick: Build Your Own Self-Balancing Vehicle in Just 2 Days with ArduinoPosted 1 year ago
- ZSWatch: An Open-Source Smartwatch Project Based on the Zephyr Operating SystemPosted 1 year ago
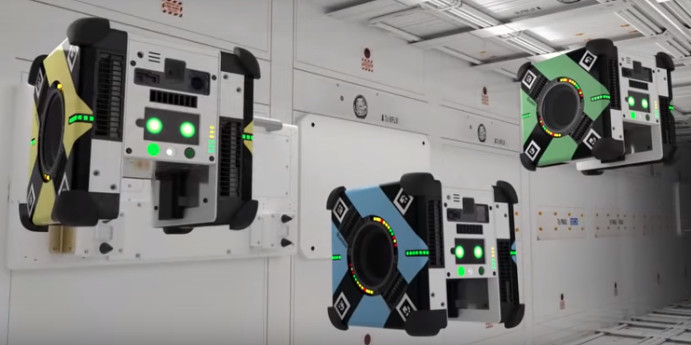
Astrobee Robots are Ready to Assist the Astronauts on the ISS

Developed at NASA Ames Research Center, the Astrobee bots are named Honey, Queen and Bumble. They are free-flying and driven by Ubuntu and offer autonomous or remote-controlled navigation.
NASA has deployed them on the ISS for assisting the astronauts rather than chatting them up. The Astrobee uses electric fans to navigate through the zero-gravity ISS environment.
“Astrobee is a free-flying robot system that will provide a research platform for the orbiting laboratory. The system includes three robots as well as a docking station for recharging. Robots will play a significant part in the agency’s mission to return to the Moon as well as other deep space missions. Astrobee will be used to test how robots can assist crew and perform caretaking duties on spacecraft. This will increase astronaut productivity and help maintain spacecraft when astronauts are not present near the Moon, Mars or other deep-space outposts.”
From a software point of view Astrobee uses three network-switched Arm-based computers running open source software. An Ubuntu/ROS stack runs on two of the computers while Android 7.1 runs on a third. There are also 7x MCUs on board for motor control. The Astrobee Robot Software is written in C++ for its high-level constructs and ROS for its middleware. It also offers a Gazebo-based dynamic simulator with a number of custom plugins.

Related Posts



{kind=link}
One Comment
Leave a Reply
-
 Arduino ISP (In System Programming) and stand-alone circuits
Arduino ISP (In System Programming) and stand-alone circuitsWe use an Arduino to program other ATmega without...
- Posted 13 years ago
-

-

-
 GSM GPS shield for Arduino
GSM GPS shield for ArduinoShield for Arduino designed and based on the module...
- Posted 12 years ago
-
 Small Breakout for SIM900 GSM Module
Small Breakout for SIM900 GSM ModuleSome post ago we presented a PCB to mount...
- Posted 14 years ago
-
 How to Control NeoPixel Installations via Wi-Fi Using Fishino and NodeMCU with Python
How to Control NeoPixel Installations via Wi-Fi Using Fishino and NodeMCU with PythonWe create NeoPixel light installations with Fishino and NodeMCU...
- Posted 2 months ago
-
 How to Adjust X and Y Axis Scale in Arduino Serial Plotter (No Extra Software Needed)
How to Adjust X and Y Axis Scale in Arduino Serial Plotter (No Extra Software Needed)The Serial Plotter in Arduino is an excellent tool...
- Posted 4 months ago
-
 Elettronici Entusiasti: Inspiring Makers at Maker Faire Rome 2024
Elettronici Entusiasti: Inspiring Makers at Maker Faire Rome 2024Maker Faire Rome 2024 is ready to amaze the...
- Posted 4 months ago
-
 makeITcircular 2024 content launched – Part of Maker Faire Rome 2024
makeITcircular 2024 content launched – Part of Maker Faire Rome 2024Applications to MakeITcircular must be in by October 3,...
- Posted 6 months ago
-
 SONY color camera module, 700 TV Lines
SONY color camera module, 700 TV LinesColor camera module equipped with a 1/3″ CCD sensor...
- Posted 6 months ago
Pingback: Astrobee Robots are Ready to Assist the Astronauts on the ISS – Bubmag