- How to Adjust X and Y Axis Scale in Arduino Serial Plotter (No Extra Software Needed)Posted 7 months ago
- Elettronici Entusiasti: Inspiring Makers at Maker Faire Rome 2024Posted 7 months ago
- makeITcircular 2024 content launched – Part of Maker Faire Rome 2024Posted 9 months ago
- Application For Maker Faire Rome 2024: Deadline June 20thPosted 11 months ago
- Building a 3D Digital Clock with ArduinoPosted 1 year ago
- Creating a controller for Minecraft with realistic body movements using ArduinoPosted 1 year ago
- Snowflake with ArduinoPosted 1 year ago
- Holographic Christmas TreePosted 1 year ago
- Segstick: Build Your Own Self-Balancing Vehicle in Just 2 Days with ArduinoPosted 1 year ago
- ZSWatch: An Open-Source Smartwatch Project Based on the Zephyr Operating SystemPosted 1 year ago
Amazing Morphing Quadrotor Drone for Search and Rescue
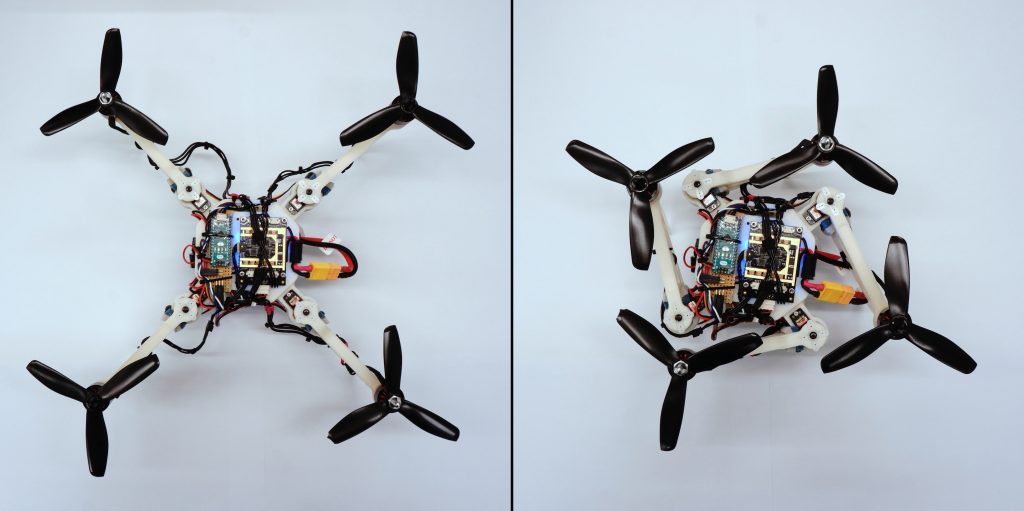
Researchers from the Robotics and Perception Group at the University of Zurich and the Laboratory of Intelligent Systems at EPFL created a new kind of drone. Both groups are part of the National Centre of Competence in Research (NCCR) Robotics funded by the Swiss National Science Foundation. Inspired by birds that fold their wings in mid-air to cross narrow passages, the new drone can squeeze itself to pass through gaps and then go back to its previous shape, all the while continuing to fly. And it can even hold and transport objects along the way.
They designed a quadrotor with four propellers that rotate independently, mounted on mobile arms that can fold around the main frame thanks to servo-motors. The ace in the hole is a control system that adapts in real time to any new position of the arms, adjusting the thrust of the propellers as the center of gravity shifts.
Flight control is handled by an advanced Snapdragon quad-core computer, while the servos that actuate the motor arms are controlled using an Arduino Nano.
In the future, the researchers hope to further improve the drone structure so that it can fold in all three dimensions. Most importantly, they want to develop algorithms that will make the drone truly autonomous, allowing it to look for passages in a real disaster scenario and automatically choose the best way to pass through them.
Please, watch the demonstrative video below to find out more information.

Related Posts




{kind=link}
-
 Arduino ISP (In System Programming) and stand-alone circuits
Arduino ISP (In System Programming) and stand-alone circuitsWe use an Arduino to program other ATmega without...
- Posted 13 years ago
-

-

-
 GSM GPS shield for Arduino
GSM GPS shield for ArduinoShield for Arduino designed and based on the module...
- Posted 13 years ago
-
 Small Breakout for SIM900 GSM Module
Small Breakout for SIM900 GSM ModuleSome post ago we presented a PCB to mount...
- Posted 14 years ago
-
 How to Control NeoPixel Installations via Wi-Fi Using Fishino and NodeMCU with Python
How to Control NeoPixel Installations via Wi-Fi Using Fishino and NodeMCU with PythonWe create NeoPixel light installations with Fishino and NodeMCU...
- Posted 6 months ago
-
 How to Adjust X and Y Axis Scale in Arduino Serial Plotter (No Extra Software Needed)
How to Adjust X and Y Axis Scale in Arduino Serial Plotter (No Extra Software Needed)The Serial Plotter in Arduino is an excellent tool...
- Posted 7 months ago
-
 Elettronici Entusiasti: Inspiring Makers at Maker Faire Rome 2024
Elettronici Entusiasti: Inspiring Makers at Maker Faire Rome 2024Maker Faire Rome 2024 is ready to amaze the...
- Posted 7 months ago
-
 makeITcircular 2024 content launched – Part of Maker Faire Rome 2024
makeITcircular 2024 content launched – Part of Maker Faire Rome 2024Applications to MakeITcircular must be in by October 3,...
- Posted 9 months ago
-
 SONY color camera module, 700 TV Lines
SONY color camera module, 700 TV LinesColor camera module equipped with a 1/3″ CCD sensor...
- Posted 10 months ago